回顾
今年暑假基本上待在了学校,一方面是因为准备出去工作,争取再学点东西;另一方面便是准备下 17 年 8 月的全国大学生电子竞赛。
赛场是我们学院所在的实验室,比赛期间几乎都待在实验室。
我们选的题目是I 组-室内可见光定位,有很多成员贡献出可行的方案,也逐步尝试突破。
前言
竞赛不仅练就的是承受压力的能力和团队协作能力,也是对本身所学知识的总结利用。故在这篇博客中我想对我们组针对电赛 I 题的解决方案做一些汇总。
因为通过了广西区的评比之后,将我们的作品进行了封箱处理,所以在此时我记录这件事,没有办法提供实物图样以及演示效果展示,我尽量将一些细节描述清楚。
正文
电子竞赛 I 组题目以及其要求
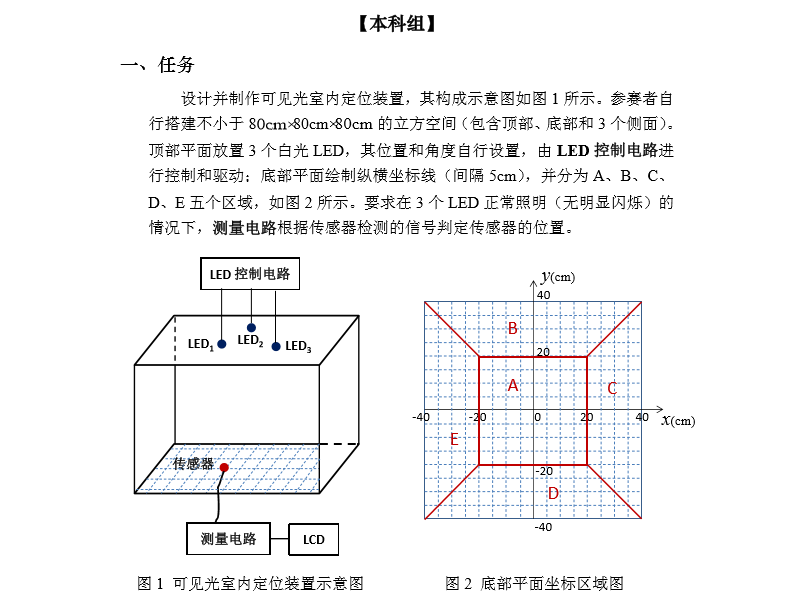
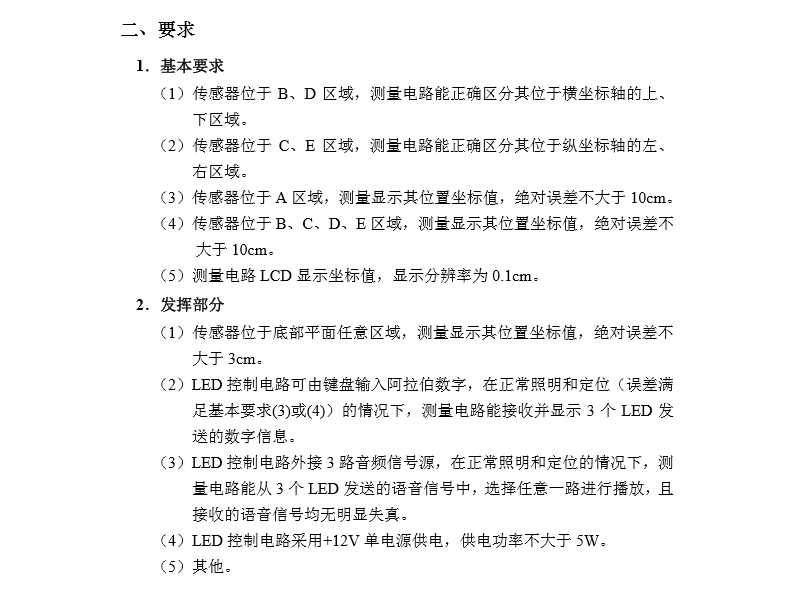
解决方案参考
解决方案一:利用 LED 频闪,光通信时间差计算距离
将 LED 灯放置于顶部三个不同位置,根据不同位置光通信时间差,计算出接收点位置。该方案是首先实行的,但是对硬件性能要求高,比如 LED 的频闪,传感器的延迟都会导致出现很大的误差。
**结论:**不可行
解决方案二:多个面放置光线强度传感器,通过光线强度计算出大致位置
将LED灯
放于顶部中心,并将底部的接收器做成金字塔样式,四个面分别贴和放置一个光线强度传感器,这样在底部不同位置,根据每个面的不同光照强度,从而判断底部传感器所在位置。该方案较为容易实现,但是受环境影响大,可以判断传感器大致所在区域,并不能确定其精确位置。
方案被其中一个小组采用,并作为一个作品去参与了竞赛,拿到了广西区二等奖。
**结论:**可行,但不精确
解决方案三:摄像头拍摄定位 LED,根据画面光斑位置计算需定位物体位置
采用底部放置摄像头的方式,说实话是铤而走险的方案(历年的竞赛中有过类似题目,有禁止使用摄像头的先例)。
该方案是再顶部面板中心放置单点光源 LED 灯,点亮的 LED 灯会在上顶部面板中形成亮斑,而摄像头则至于底部,用于捕捉该白色色斑,根据其亮斑在采集图像中的相对位置,计算出底部摄像头(传感器)的位置。
**结论:**可行,且位置精准
方案选择
元器件
- OpenMV2 开发板
- 白光 LED 灯 1w * 3
- 80cm _ 80cm 木制板 _ 5
- 51 单片机开发板
- 12864LCD 液晶显示屏
方案选择:方案三,摄像头定位光斑
我们采用的是底部放置摄像头的方案,分为三个模块。
模块一是题中要求的LED灯,我们将三个LED灯汇聚成一个灯,让它看起来像是一个亮点,该点放置于顶部面板对角线交点;
**模块二是传感器模块,我们将传感器模块水平放置于底部坐标面板上,并且摄像头的图像采集照片平面的长宽要和底部面板坐标轴平行; **
模块三是数据显示模块,我们是用 51 单片机开发板结合 12864LCD 液晶显示器,通过串口接收数据,实现在屏幕上实时刷新当前坐标位置。
注意事项
- 实物搭建:木制板
80*80cm*5块形成立方体,内壁贴满黑色磨砂纸,可用于较少外界光以及立方体内LED灯反光干扰。 - 捕捉白色色斑:我们设置为捕捉单点最亮白色色块,因为五面立方体,有一面暴露与室外环境,故室外光线太强会导致目标色斑捕捉错误。故我们将三个
LED灯汇聚成一点,增强光照强度,即使在外界光照较为强烈的情况下也不会产生干扰。
主要代码
测量设备:在 OpenMV 开发板中写入的代码
开发环境:
Python3.5更多教程可以参考@云江科技的教程:【直达链接】
import sensor, image, time
from pyb import UART
uart = UART(3, 9600) # 设置为串口3、波特率为9600发送数据
thresholds = (245, 255) # 设置监测色块阈值
sensor.reset() # 摄像头初始化
sensor.set_pixformat(sensor.GRAYSCALE) # 设置为灰度模式
sensor.set_framesize(sensor.QQVGA) # 画幅为QQVGA即分辨率为160*120
sensor.skip_frames(time=2000) # 跳过起始画面,获取稳定图像
sensor.set_auto_gain(False) # 在色块检测模式下关闭自动补光
sensor.set_auto_whitebal(False) # 关闭白平衡
clock = time.clock()
xPositionNow = 0 # 初始化各坐标值
yPositionNow = 0
xPositionLast = 0
yPositionLast = 0
imageSize = 128
while True:
clock.tick()
img = sensor.snapshot() # 获取当期所采集到的图像快照
# 设置色块阈值,具体数值情况可以通过OpenMVIDE中的阈值调整功能来得出
# 工具 → Mechine Vision → Threshold Editor
# area_threshold面积阈值设置为100 ,如果色块被面积小于100,则会被过滤掉
# pixels_threshold 像素个数阈值,如果色块像素数量小于这个值,会被过滤掉
# merge 设置为True,合并所有重叠的寻找到的blob为一个色块
for blob in img.find_blobs([thresholds], pixels_threshold=100, area_threshold=100, merge=True):
# 绘制相应的图形,方便我们测试的时候使用
img.draw_rectangle(blob.rect())
img.draw_cross(blob.cx(), blob.cy())
x = blob.cx() - (imageSize / 2)
y = (imageSize / 2) - blob.cy()
xPositionLast = xPositionNow
yPositionLast = yPositionNow
# 这个0.7的数值不固定,只是在调试的时候为了使得像素点和坐标单位cm匹配所设置的数值
xPositionNow = x * 0.7
yPositionNow = y * 0.7
# 测试时打印出当前坐标
print(xPositionNow, yPositionNow, end=',')
# 通过串口将坐标数据发送给单片机处理,实际上发送的就是一段文本
uart.write(',' + str(xPositionNow) + ',' + str((-1) * yPositionNow) + ',')
# 判断当前所在区域(A\B\C\D)
if abs(xPositionNow) < 20 and abs(yPositionNow) < 20:
uart.write('A\n')
print('A')
elif yPositionNow < -20 and yPositionNow < xPositionNow and (-1) * yPositionNow > xPositionNow:
uart.write('B\n')
print('B')
elif xPositionNow > 20 and (-1) * yPositionNow < xPositionNow and yPositionNow < xPositionNow:
uart.write('C\n')
print('C')
elif yPositionNow > 20 and xPositionNow < yPositionNow and (-1) * xPositionNow < yPositionNow:
uart.write('D\n')
print('D')
else:
uart.write('E\n')
print('E')
# 0.5s更新一下坐标数据
time.sleep(500)
输出设备:显示设备的 51 单片机中写入的代码
#include<reg52.h>
#include<stdio.h>
#include<string.h>
#include<stdlib.h>
#include<math.h>
#define uchar unsigned char
#define uint unsigned int
#define Buf_Max 80
#define GPS_Buffer_Length 80
#define gpsRxBufferLength 76
#define false 0
#define true 1
sbit led1 = P1^1;
sbit led2 = P1^2;
bit flag = 1;
typedef struct SaveData
{
char GPS_Buffer[GPS_Buffer_Length];
char isGetData; //是否获取到GPS数据
char isUsefull; //定位信息是否有效
} xdata _SaveData;
char idata gpsRxBuffer[gpsRxBufferLength];
uchar RX_Count = 0;
_SaveData Save_Data;
char tempr;
#include "uart.h"
#include "lcd.h"
/*********初始化函数*********/
void init()
{
TMOD=0x20; //设定定时器T1工作方式2
PCON=0x00; //串口波特率正常9600,不加倍;
SCON=0x50; //蓝牙串口工作方式为3
TH1=0xfd; //T1定时器装初值
TL1=0xfd; //T1定时器装初值
TR1=1; //启动T1定时器
REN=1; //允许串口接收
SM0=0; //设定串口工作方式1
SM1=1; //设定串口工作方式1
EA=1; //开总中断
ES=1; //开串口中断
EX1=1;
}
/***********主函数**********/
void main()
{
init(); //初始化
lcd_init();
flag = 0;
while(1)
{
printfGps();
// write_cmd(0x01);
}
}
void sint() interrupt 4
{
ES=0;
if(RI == 1 && flag == 0)
{
RI=0;
tempr=SBUF;
if(tempr == '\n')
{
memset(Save_Data.GPS_Buffer, 0, GPS_Buffer_Length); //清空
memcpy(Save_Data.GPS_Buffer, gpsRxBuffer, RX_Count); //保存数据
Save_Data.isGetData = true;
RX_Count = 0;
memset(gpsRxBuffer, 0, gpsRxBufferLength); //清空
gpsRxBuffer[RX_Count] = '\0';//添加结束符
}
else
{
gpsRxBuffer[RX_Count++] = tempr;
}
}
ES=1;
}
写在最后
发现写博客虽然对巩固知识很有帮助,但是也确实是一件费时费力的事情。
本来计划详细讲解一下过程,分享一下经验,但马上要出学校开始找工作了,觉得时间完全不够用啊。包括写这篇博文记录一下,中间也是跨了一个多月的时间才重新总结,所以想想先把分析思路和主要代码贴出来,关于更多具体的分析,就不再赘述了。